 2015, Vol. 26
2015, Vol. 26



2. 北京航空航天大学 计算机学院, 北京 100191
2. School of Computer Science and Engineering, BeiHang University, Beijing 100191, China
广泛应用于航空、航天、武器装备、核能、汽车控制等关键信息领域的复杂嵌入式实时系统被称为安全攸关实时系统(safety-critical real-time systems).由于功能和非功能要求不断提高,系统复杂度急剧增加,如何设计与实现高质量的安全攸关实时系统,并有效控制开发时间和成本,是学术界和工业界共同面临的难题.近年来,模型驱动开发方法逐渐成为安全攸关实时系统设计与开发的重要手段[1],而作为复杂嵌入式实时系统的体系结构设计与分析语言标准,AADL(architecture analysis and design language)[2, 3]日益受到关注,并逐渐发展成为一个新的研究热点.
AADL语言提供了一种标准、全面的方式,对安全攸关实时系统的软/硬件体系结构、运行时环境、功能以及非功能属性进行表达.目前,模型转换是AADL模型形式验证与分析的主要途径,如转换到BIP(behavior interaction priority)[4]、Fiacre[5]、动作时序逻辑TLA+[6]、同步语言Signal[7]等,目的是为了重用这些模型上已有的验证和分析能力.
AADL语言为安全攸关实时系统提供了丰富的表达能力,但其大部分语义仍然采用自然语言和例子进行解释.已有的AADL语义研究主要采用转换语义(translational semantics)的方式[8, 9],即,用另一种形式语言(称为目标语言)来表达AADL语言的语义,如BIP[4],Fiacre[5],TLA+[6],Signal[7],IF[10],RTMaude[11],ACSR[12],Lustre[13], Petri Net[14]等,这种方式使得语义更易于理解,也是AADL模型转换的基础.但是,大部分已有研究都针对较小的AADL子集,没有给出一个比较完整的形式语义定义;其次,主要采用自然语言作为元语言环境,关注的AADL子集和目标语言都没有给出精确定义,转换规则也不够形式化;最后,资源利用正确性是安全攸关实时系统的一个重要性质,各种目标语言具有不同的表达能力,但能够显式表达资源行为的语言较少.
抽象状态机(abstract state machine,简称ASM)[15]广泛应用于软、硬件系统设计以及形式语义定义.为了支持实时系统的功能行为、时间属性以及资源消耗的描述,2006年,MIT在ASM的基础上提出了时间抽象状态机(timed abstract state machine,简称TASM)[16, 17].相对于BIP,Fiacre,TLA+,Signal等目标语言,TASM能够同时支持功能、时间以及资源等行为的验证和分析,而且可读性较好.
因此,本文提出一种基于TASM的AADL形式转换语义,总体思路如下:
(1) 针对一个较为完整的AADL子集,形式地给出子集的抽象语法;
(2) 形式地给出TASM的抽象语法;
(3) 基于语义函数清晰刻画AADL语言到TASM语言的整体映射关系,并基于类ML[18]的元语言形式定义转换语义规则.
同时,在形式转换语义的基础上,基于AADL的开源建模环境OSATE[19],设计并实现AADL模型验证与分析工具——AADL2TASM,以支持通过模型检测工具UPPAAL[20]以及仿真分析工具TASM ToolSet[21]对AADL模型进行验证和分析.
本文第1节简要介绍AADL语言的基本概念.第2节给出本文AADL子集的抽象语法.第3节给出TASM语言的基本概念及其抽象语法.第4节详细介绍形式转换语义.第5节简要介绍AADL2TASM模型转换工具.第6节结合航天器导航、制导与控制系统实例,介绍AADL2TASM工具的应用情况.第7节给出相关工作比较.第8节是本文的总结,并讨论模型转换正确性问题.
1AADL语言简介安全攸关实时系统是应用软件、运行时环境(虚拟机或操作系统)以及硬件平台深度融合的复杂系统, AADL语言与之对应地提供了软件体系结构、运行时环境以及硬件体系结构的建模概念:通过线程(thread)、线程组(thread group)、进程(process)、数据(data)、子程序(subprogram)等构件以及连接来描述系统的软件体系结构;通过处理器(processor)、虚拟处理器(virtual processor)、存储器(memory)、外设(device)、总线(bus)、虚拟总线(virtual bus)等构件以及连接来描述系统的硬件体系结构;通过分发协议(dispatch)、通信协议(communication)、调度策略(scheduling)、模式变换协议(mode change)以及分区机制(partition)等属性来描述系统的运行时环境,在AADL语言中称为执行模型(execution model);最后,通过系统(system)构件进行组合,层次化地建立系统的体系结构模型.另外,行为附件(behavior annex)[22]以变迁系统(transition system)的形式增强了AADL对线程构件和子程序构件功能行为的详细描述能力,而且行为附件与执行模型有着紧密的联系,即,执行模型定义了线程和子程序周期性(非周期性或偶发)地读取、计算和发送数据,行为附件则是对计算状态内的执行行为进行详细刻画.因此,软/硬件体系结构、执行模型以及行为附件构成一个完整的AADL描述.
AADL还包括其他方面的扩展,进一步丰富了AADL语言的表达能力.例如,故障模型附件(error model annex)[23]扩展了构件和连接的故障事件、故障概率等非功能属性,以支持系统可靠性分析;为了支持ARINC653标准,发布了ARINC653扩展附件[24].AADL语言的基本概念可进一步参见文献[2, 3, 25].
2AADL子集及其抽象语法从2004年AADL标准正式发布以来,其核心文档及扩展附件在不断的修订和发展.例如,目前核心文档有AADL V1.0 (AS5506),AADL V2.0 (AS5506A)和AADL V2.1 (AS5506B)这3个版本,AADL V2.2也正在修订当中;扩展附件则包括Annex AS5506/1,Annex AS5506/2,Annex AS5506/3等系列文档,正在制定当中的constraint annex[26]和BLESS annex[27]将发布为Annex AS5506/4.AADL已成为一个庞大的标准 体系,因此,AADL语义形式化都是选择一个恰当的子集来进行的.
依据航天器等安全攸关实时系统的部分特征,本文选取的AADL子集如下:
(1) 体系结构方面,包括系统构件、进程构件、线程构件、处理器构件、存储器构件以及总线构件等结构元素;
(2) 执行模型方面,包括进程执行、模式变换、线程分发、线程执行、端口通信、调度、资源共享等执行模型属性;
(3) 扩展附件方面,主要包括行为附件.
该子集基本上能构成一个比较完整的AADL描述:按照系统、进程、线程以及行为附件这4个层次来建立系统的AADL模型,并将进程映射到处理器构件、连接映射到总线构件、数据映射到存储器构件,系统构件和进程构件可以定义模式及模式变换,而线程执行会受到进程加载、模式变换、分发、调度的影响,线程通信也可能受到模式变换的影响.由于AADL对执行模型有严格的定义,这使得整个系统的行为是确定并可预见的.
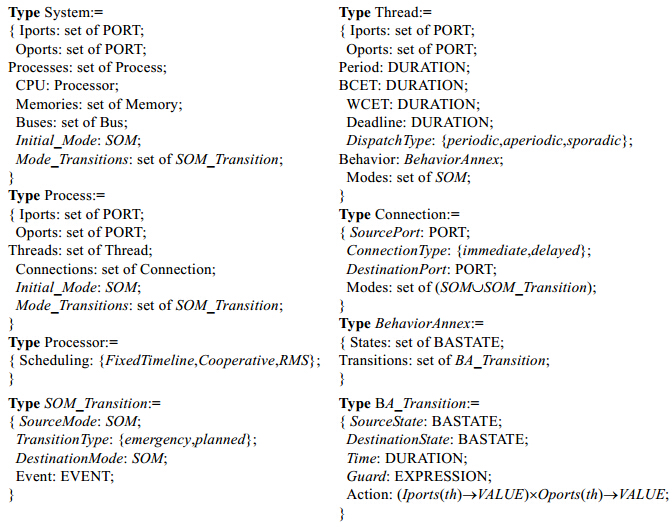
我们基于类型的方式给出AADL子集的抽象语法.在抽象语法表示中,结构元素和执行模型属性表达在同一个语法结构当中.其中,PORT,SOM,EVENT,DURATION,BASTATE,EXPRESSION以及VALUE为预定义类型.同时,在系统构件中,我们仅考虑单处理器,并且默认将进程构件映射到处理器构件.
一个TASM描述由两部分组成:环境和抽象机.环境包括环境变量及其类型,而基于变量的当前取值,抽象机进行计算,然后更新变量的取值,以实现系统的状态变迁.同时,TASM在变迁上增加了时间和资源的定义,分别表示变迁的持续时间和资源消耗.
定义1. TASMSPEC=áE,ASMñ,为一个二元组:
(1) 环境E=áEV,TU,ERñ,EV表示环境变量,其类型定义在TU中,主要包括整数类型、Boolean类型、实数类型以及用户自定义类型;ER={(rn,rs)}表示资源环境变量的定义,如处理器、存储器、带宽、功耗等, rn是资源的名称,rs=[lower,upper]则表示资源的大小.
(2) 抽象机ASM=áMV,CV,IV,Rñ,监控变量MV(monitored variables)为影响抽象机执行的变量的集合;受控变量CV(controlled variables)为抽象机将要更新的变量的集合;内部变量IV(internal variables)为抽象机内部使用的中间变量,不受环境的影响;R=án,t,RR,rñ为抽象机的执行规则,n是规则的名称,t表示规则执行的持续时间,可以是一个固定值,或一个区间[tmin,tmax],也可以是关键字next(t:=next表示机器处于等待状态,直到某个事件发生),RR是型如rn:=rs的资源消耗,r则是型如“if Condition then Action”的规则集合,其中,Condition是监控变量的当前取值,Action包括受控变量的赋值、skip以及通信等,也支持“else then Action”规则.
ASM可以有多条规则,我们用R1,R2,…,Rn表示,但规则之间是互斥执行的,即,每次只有一条规则满足条件并执行(假设为Ri).Ri执行完成之后,需要对环境变量的取值、时间以及资源消耗进行更新.因此,ASM的执行可以表示为一个更新集序列.
除了时间和资源行为以外,TASM还支持并发组合、层次组合以及同步通信等行为的描述.为此,TASM将抽象机分为3类:主抽象机(main ASM)、子抽象机(sub ASM)和函数抽象机(function ASM).同步通信主要定义在主抽象机之间,并可以采用共享变量和通道两种方式.
此外,TASM使用模型检测工具UPPAAL[20]以及仿真分析工具TASM ToolSet[21]对无死锁性、安全性、活性、时间正确性、资源利用正确性等关键性质进行验证和分析.
3.2TASM抽象语法本文仅采用共享变量的通信方式,因此,TASM的抽象语法表示如下:

P定义了单个抽象机的行为,x:=exp表示更新受控变量x的取值;skip表示不作任何动作;time表示规则执行的时间;resource表示规则执行期间所消耗的资源,r是资源的名称;PÅP表示同一个抽象机器不同规则之间的选择操作;PÄP表示同一条规则内不同动作之间的并发操作,但不能同时去更新同一个变量的取值;P||P表示多个抽象机器之间的并发操作,它们共享相同的环境E.
P的递归定义可以抽象表示子抽象机和函数抽象机的调用.
单个TASM抽象机的执行语义是一个循环:依据环境变量的当前取值,选择一条满足条件的规则,等待规则的持续时间,并消耗资源;持续时间完成后,更新环境变量的取值,如果存在同步,则需要等待;该规则执行完之后,选择下一条规则继续执行.多个并发抽象机的语义则要考虑更新集的组合.
4 基于TASM的AADL形式转换语义基于AADL子集的抽象语法和TASM的抽象语法,我们以“层次化、模块化”的方式给出转换语义定义.
4.1 系统构件系统构件的语义是由其他建模元素的语义组合而成,我们用一个全局语义函数来表示:
该语义函数分为3个层次:系统构件的子构件层次、进程构件的子构件层次以及行为附件层次,每个层次都包括两部分:语法结构(软/硬件构件的结构元素、执行模型属性以及行为附件的结构元素)映射为TASM环境变量,动态行为(执行语义以及行为附件的语义)映射为TASM抽象机.我们将使用类ML的元语言来表示映射和组合关系:
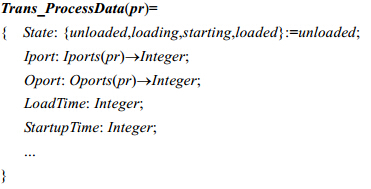
进程构件代表系统的虚拟地址空间,当对应的处理器启动之后,进程将要执行的二进制镜像文件加载到虚拟地址空间,包括文件加载和进程启动(即初始化)两个步骤,而且整个过程可能会出错或被终止.
首先,将进程构件的输入/输出端口、时间属性以及进程状态转换为TASM环境变量.其中,数据端口用Integer变量表示,事件端口用Boolean变量表示,事件数据端口用两个变量(Integer,Boolean)来表示.进程定义的加载时间和启动时间,可以作为TASM规则的执行时间.
语义规则4.2.1. AADL进程构件的TASM环境变量表示.
其次,进程构件的执行语义转换为一个包含7条执行规则(Loading Begin,Loading Complete,Loading Abort, Starting Complete,Starting Abort,Process Stop,Process Normal)的TASM抽象机.TASM可以很方便地在每个时刻或时段,用一条规则来表示相应的行为.共享变量:
· Started(processor)表示处理器是否启动成功,默认Started(processor)=true;
· Abort(processor)表示处理器是否被中断;
· Load(th)表示该进程中的线程是否加载成功;
· Stop(processor)表示处理器是否停止,如果Stop(processor)=false,进程进入Process Normal规则,且一直处于loaded状态.
这些共享变量也定义在TASM环境中.
语义规则4.2.2. AADL进程构件执行语义的TASM表示.
在系统构件和进程构件中都可以定义模式变换,对应各自子构件和连接的配置的变化.我们重点考虑模式变换对线程执行和通信的影响,而且模式变换发生在所属的进程构件启动之后.图 1给出了系统模式变换的执行状态和动作.
 | Fig. 1 Execution states and actions of an AADL SOM transition图 1 AADL系统模式变换的执行状态和动作 |
系统开始处于旧模式(oldSOM)下,模式变换请求(mode change request,简称MCR)到达之后,系统进入一个模式变换的准备期,如果模式变换的类型为紧急变换(Mode_Transition_Response=Emergency),则此准备期的持续时间为0;如果模式变换的类型为计划变换(Mode_Transition_Response=Planned),则此准备期将持续到旧模式下的关键线程的超周期(记为Hyper(critical_old)),我们称为同步点(synchronization point),而且此时间为绝对时间.在此期间,旧模式下的线程将继续执行,这是为了保证模式变换期间线程执行和通信的确定性.在安全攸关实时系统中,任务的关键程度说明了任务的重要性,AADL用“Synchronized_Component”属性为真的周期性线程来表示关键线程.
在此同步点上,系统进入Mode_transition_in_progress状态,并正式开始模式变换:添加新模式(newSOM)下且不属于旧模式(oldSOM)的线程;删除旧模式下且不属于新模式的线程和连接;同时属于两个模式的关键线程继续执行;同时属于两个模式的连接可以用于通信.完成这些动作之后,系统才正式进入新模式,并激活新模式下的连接.如果模式变换的类型为紧急变换,则模式变换的持续时间为0;如果模式变换的类型为计划变换,则模式变换将持续到在此期间继续执行的关键线程的超周期(即,同时属于两个模式的关键线程),并且可能为多个超周期,我们记为Hyper(critical_continue)*.
系统每次只响应一个模式变换请求,在模式变换过程中,其他MCR都会被忽略,而且不考虑多个MCR的优先级.
在TASM环境变量中,我们引入“CurrentSOM”,“ModeTransitionInProgress”,“ArriveHyperPeriod”等变量.
语义规则4.3.1. AADL系统模式变换的TASM环境变量表示.
Trans_ModeData(tr)=
{ CurrentSOM: SOM;
ArriveHyperPeriod: Boolean;
ModeTransitionInProgress: Boolean;
SOMRequest: Boolean;
…
}
其执行语义转换为TASM_SOM_Transition和MCR两个抽象机,分别对应模式变换的行为和模式变换请求的产生.前者包括Waiting Hyper Period,Mode Transition In Progress,Mode Transition以及Waiting MCR等4条规则,并通过共享变量Activation(th)和Activation(cn)来表示线程和连接是否处于当前模式.对于计划变换,由于同步点Hyper(critical_old)是绝对时间,因此用Waiting Hyper Period规则来表示超周期的到达,并在这个时刻进入Mode_transition_in_progress状态;对于立即变换,不需要同步点,而是立即进入Mode_transition_in_progress状态,并立即完成模式变换.MCR& lt; s pan="" style='font-family:宋体;color:black'>抽象机包含两条规则,并用[0,Hyper(critical_old)]来表示随机产生MCR的时间.由于Hyper(critical_continue)*可能为多个超周期,即,从Mode_transition_in_progress状态到End_of_SOM_ transition状态的持续时间不确定,因此我们使用另一个抽象机Manage_Hyper_Continue来管理这个时间.
语义规则4.3.2. AADL系统模式变换执行语义的TASM表示.

考虑数据端口通信的线程构件的语义是由线程构件的基本行为以及线程分发和数据端口通信的执行语义构成,表示为语义规则4.4.1和语义规则4.4.2.
语义规则4.4.1. 考虑数据端口通信的线程构件的TASM环境变量表示.
Trans_ThreadData(th)=
{State: {halted,waiting_mode,waiting_dispatch,waiting_execution,execution,
completed,waiting_next_dispatch}:=waiting_mode;
Iport: Iports(th)®Integer;
Oport: Oports(th)®Integer;
RscUsage: RESOURCES®Integer;
WaitingNextDispatch: Boolean;
…
}
Trans_ConnectionData(cn)=
{ ConnectionType: {immediate,delayed};
…
}
语义规则4.4.2. 考虑数据端口通信的线程构件执行语义的TASM表示.

线程构件表示一个二进制镜像中顺序执行的指令序列,是AADL主要的执行和调度单元.任何一个线程构件在执行之前,都需要将其二进制镜像文件加载到进程,加载成功才能处于等待分发状态(waiting dispatch);如果系统存在不同模式,只有处于当前模式的线程才能被分发,否则,线程处于等待模式状态(waiting mode);处于等待分发状态的线程可以被周期性时钟或事件来分发,包括周期、非周期、偶发等多种分发协议;分发后的线程需要等待调度执行(waiting execution);得到处理器的线程进入执行状态,执行的具体行为则可用行为附件(behavior annex)来详细刻画;对于线程间通信,AADL采用“Input-Compute-Output”的计算模型,默认情况下,在线程分发的时刻读取所有输入端口的数据并等待计算,在计算完成时刻将结果写入输出端口,但不同的通信机制(immediate/delayed)会影响线程的读、写时间.如图 2所示.
| Fig. 2 Execution states and actions of an AADL thread component图 2 AADL线程构件的执行状态和动作 |
· Initialization规则:用来处理线程和进程加载的关系,通过共享变量Load(th):{true,false}来同步,进程构件的执行语义在第4.2节已经定义.
· Activation规则:用来表示线程进入当前模式(Enter(mode)),并通过共享变量Activation(th)=true来同步,模式变换的执行语义在第4.3节中已经定义.
· Dispatch规则:用来处理线程和分发器(dispatcher)的关系,分发器可以周期、非周期或偶发性地分发线程,通过共享变量Dispatch(th):{true,false}来同步,并将IportBuffer中的数据读取到输入端口中.
· Waiting Execution规则:线程执行会受到通信依赖或调度的影响,我们使用共享变量Get_CPU(th): {true,false}来同步,调度器(scheduler)的执行语义将在第4.5节中定义.
· Execution规则:如果没有定义行为附件,此规则的执行时间为[BCET,WCET],我们用“ComputeOutPut”函数来抽象表示其执行,并且可以定义处理器、存储器、总线、功耗的利用率,如果定义了行为附件,则需要对这条规则进行求精,将在第4.6节中给出.
· Write Data规则:执行完成之后,直接将输出端口的数据写入接收线程的IportBuffer当中.
· Waiting Next Event规则:用于处理条件不满足而需要等待的情况,例如进程加载失败、不处于当前模式、没有被分发、没有得到处理器资源等,该规则使用了TASM非常重要的同步机制:t:=next.
· Deactivation规则:用来表示线程退出当前模式(Exit(mode)),并通过共享变量Activation(th)=false来同步,模式变换的执行语义在第4.3节中已经定义.
4.4.2 线程分发在AADL中,分发器并不是一个独立构件,而是线程构件的一个执行模型属性,支持周期、非周期、偶发、实时、混成、后台这6种分发协议,本文主要考虑常用的前3种情况.
线程分发器的执行语义用另一个抽象机Dispatcher(th)来表示,并和线程基本行为的抽象机并发执行,它们之间通过共享变量Dispatch(th)和线程状态变量State(th)来同步.我们用t:=[0,max]表示非周期事件的到达时间,用t:=[period,max]表示偶发事件的到达时间.其中,Dispatch Thread规则表示:
· 如果线程属于当前模式,并且处于等待分发状态,则分发该线程.
· 对于周期性线程,线程被分发之后,分发器需要等待一个周期,再让线程进入下一次分发.由于需要考虑模式变换的影响,因此将线程状态设为等待模式.
· 对于非周期或偶发线程,线程执行完成之后,就可以进入等待模式状态.
4.4.3 数据端口通信本文主要关注周期性线程之间的数据端口通信.端口通信的基本方式是采样(sampled),但由于并发和抢占的原因,通信行为可能存在不确定性,从而导致整个系统存在延迟、抖动或不稳定.为此,AADL提供了两种确定性的数据端口通信机制:即时通信(immediate)和延迟通信(delayed).
· 即时通信要求
(1) 发送线程和接收线程都是周期性线程.
(2) 对于分发:如果周期相同(称为synchronous),要求两个线程同时分发;如果周期不同,当发送线程周期是接收线程周期的倍数(称为oversampling),即,发送线程分发一次,而接收线程会分发多次,但一般要求发送线程的分发和接收线程的第1次分发是同时的;当接收线程周期是发送线程周期的倍数(称为undersampling),即,发送线程分发多次,而接收线程分发一次,一般要求发送线程的第1次分发和接收线程的分发是同时的.
(3) 对于执行:虽然两个线程是同时分发的,但接收线程的真正执行要等到发送线程完成之后才能开始,即,发送线程在其Complete时刻将数据写入输出端口,而接收线程需要在此刻重新读取发送线程的输出数据,并开始执行.
· 延迟通信要求
(1) 发送线程和接收线程都是周期性线程.
(2) 对于分发:存在Synchronous,Oversampling,Undersampling这3种情况,但不要求两个线程同时分发.
(3) 对于执行:发送线程是在其Deadline时刻(一般等于周期)才将数据写入输出端口,而接收线程在其Dispatch时刻读取上一个周期发送线程的输出数据,因此不需要重读新数据.
首先,将连接类型等信息映射为TASM环境变量;其次,其转换语义是在线程构件以及周期性分发协议的语义之上,进一步扩充通信对端口读写时间的影响,我们将Trans_Connection(th)分为Trans_Connection_Read(th), Trans_Connection_Write_Imm(th)以及Trans_Connection_Write_Delay(th)),分别对应即时通信的接收线程在开始执行之前重读最新数据、即时通信的发送线程在Complete时刻输出数据以及延迟通信的发送线程在Deadline时刻输出数据.隐含的线程执行顺序将显式地表示为一个调度器,并在第4.5节给出.而且,语义规则是针对任意的周期性线程,Synchronous,Oversampling,Undersampling,Immediate以及Delayed等多种情况都考虑在其中.
4.5 调度器本文讨论的调度主要是针对单处理器,且为非抢占式调度:
· 首先,两种确定性的数据端口通信方式不仅规定了发送线程和接收线程的端口读写时间,还隐含地给定了线程执行顺序,我们称为静态调度(offline scheduling).静态调度在安全攸关实时系统领域经常使用,即,使用调度表静态地给出执行顺序,而且可以方便地表示任务之间的依赖关系.
· 其次,AADL支持在处理器构件中显式定义调度策略,包括固定时钟驱动、轮转、RMS、EDF、SporadicServer、SlackServer以及ARINC653等调度策略.我们主要考虑固定时钟驱动、轮转调度以及RMS等调度策略,且用于独立任务.依据AADL时间参数,可以得到静态的调度表.
首先给出调度器所对应的TASM环境变量,变量CPU包括free和busy两个状态.
语义规则4.5.1. AADL线程调度对应的TASM环境变量表示.
Trans_SchedulerData=
{ Deadline: Integer;
CPU:{free,busy};
…
}
其次给出调度器对应的TASM抽象机.按照调度表,我们构造线程执行的固定优先级顺序(这里用令牌Token={th1,…thi,…thn}来表示),以确保多个线程不同时使用处理器.
语义规则4.5.2. AADL线程调度执行语义的TASM表示.
在基本调度策略的基础上,可以进一步考虑资源共享对调度的影响.线程构件需要增加Waiting resource状态,而资源可以表示为带{idle,used}两个状态的抽象机,并与线程构件执行语义的抽象机并发执行.
4.6 行为附件AADL线程构件使用的是“Input-Compute-Output”计算模型,输入、输出行为是由线程的基本执行语义和线程通信语义决定的,而行为附件则是对计算行为进行细化和求精.
图 3给出了行为附件与线程执行模型的关系:线程执行模型的分发机制将数据写入输入数据端口;行为附件读取这些数据做逻辑判断并计算,计算完成之后,将结果写入输出数据端口.同时,行为附件还可以通过输入事件端口、输入事件数据端口接收事件和数据,如接收中断请求、对非周期性线程的分发条件进行细化等;通过输出事件端口、输出事件数据端口发送事件,如发送中断请求、子程序调用、模式变换请求等.因此,行为附件的执行语义是对线程构件执行语义中“Execution”规则的细化和求精.
 | Fig. 3 Relation between the behavior annex and execution model 图 3 行为附件与线程执行模型的关系 |
首先,我们给出基本的转换思路:状态变量(state variables)映射为TASM环境变量;状态(state)映射为抽象机的内部状态(internal variables);每条变迁映射为一条TASM规则,而规则的条件由当前线程构件的状态(State(th))、当前行为附件的状态以及行为附件的变迁条件(guard)组成,规则的执行部分则包括行为附件的执行动作(action)以及对行为附件下一个状态的赋值;我们还增加一条规则(behavior annex completion),让线程构件进入下一个状态;最终,用这些规则来替换线程构件执行语义中的“Execution”规则.
其次,还需要对Guard和Action的语义进行细化:
Guard主要包括事件接收(áeventñ)、端口数据的逻辑判断(áBExprñ),而后者可拆分为两部分:“on áBExprñ”和“when áBExprñ”,其表示形式如下:
águardñ::=áBExprñ|[on áBExprñ®] áeventñ [when áBExprñ].
áeventñ表示从事件端口接收事件(P?)或从事件数据端口接收事件和数据(P?(x)),P为端口名,x为状态变量,我们可以引入Boolean变量来表示接收事件,x的数据则保存到对应的环境变量当中;áBExprñ是对数据端口或事件数据端口的数据进行逻辑判断,可以映射为对TASM环境变量的操作,on áBExprñ表示对当前状态下的端口数
据进行逻辑判断,而when áBExprñ表示对将要读取的数据进行逻辑判断.我们将其简化表示为![]() .
.
Action主要包括变量赋值、数据或事件的发送、计算时间、等待时间等.变量赋值可以直接映射为对TASM环境变量的赋值;对于数据发送(P!(x),P=x)和事件发送(P!),可以引入Boolean变量来表示发送事件,x则保存到对应的环境变量当中;在变迁上定义时间属性,可以更精确地给出执行和等待的时间序列,计算时间(Computation(min,max))表示使用CPU的时间,等待时间(Delay(min,max))表示被挂起或中断的时间,由于行为附件的Action是作用在变迁上,因此这些时间属性可以直接映射为TASM规则的执行时间.
在TASM环境变量中,我们引入“CurrentBAState”,“isInitial”,“isFinal”等变量.“isInitial”用于判断行为附件的状态是否为初始状态;“isFinal”用于判断行为附件的状态是否为完成状态,而其执行语义为线程构件执行语义“Execution”规则的求精.
语义规则4.6.1. AADL行为附件的TASM环境变量表示.
Trans_BehaviorAnnexData(th)=
{ CurrentBAState: BAState;
isInitial: BAState®Boolean;
isFinal: BAState®Boolean;
…}
语义规则4.6.2. AADL行为附件执行语义的TASM表示.
在转换语义的基础上,基于AADL的开源建模环境OSATE[19],设计并实现模型转换工具AADL2TASM,以支持对AADL模型进行形式验证和分析.其体系结构如图 4所示.
 | Fig. 4 Architecture of the model transformation toolAADL2TASM 图 4 AADL2TASM模型转换工具的总体架构 |
(1) 在建模方面,开源建模环境OSATE建立在Eclipse平台上,支持以插件形式实现AADL模型的验证和分析工具,也可以使用TOPCASED建模环境.
(2) 在模型转换方面,采用模型转换语言ATL(atlas transformation language)[28]来实现AADL模型到TASM模型的自动转换,TASM使用模型检测工具UPPAAL以及仿真分析工具TASMToolSet对模型进行验证和分析.为了将UPPAAL也紧密集成到OSATE当中,基于MIT给出的转换算法[17],采用ATL实现TASM模型到UPPAAL模型的自动转换,并将两个模型转换工具集成为统一的OSATE插件,方便用户使用.
(3) 在性质验证与分析方面,TASM ToolSet支持对模型的完整性和一致性进行验证,以及对时间行为和资源行为进行仿真分析;而UPPAAL支持对死锁、安全性、活性以及实时性质进行验证,两者的优势可以互补.
(4) 在系统应用方面,在工业界项目的支持下,我们分别对航天器导航、制导与控制系统、机载飞行控制系统以及弹载飞行控制系统进行了建模和实例性验证.
6 应用实例 6.1 系统介绍导航、制导与控制系统,即GNC系统,是航天器在轨运行的核心保障系统,承担着航天器姿态和轨道确定与控制的重要任务[29].GNC系统一般由导航传感器、控制计算机和执行机构组成.其中,
· 导航传感器包括导航相机、星敏感器、陀螺、加速度计等,主要用于采集各种数据.
· 控制计算机也称为姿态与轨道控制系统(attitude and orbit control system,简称AOCS),通过收集和处理各种传感器的测量数据来完成制导和控制任务,主要执行轨道确定、轨道控制、姿态确定、姿态控制等功能,同时负责与其他分系统进行交互,AOCS一般采用双机备份的方式来提高可靠性.
· 执行机构包括反作用飞轮、喷嘴、轨控发动机等,反作用飞轮和喷嘴用来控制姿态,而轨控发动机则用来执行轨道机动和修正.
导航传感器和控制计算机之间存在一个接口装置,用来对采集的数据进行前期处理,称为数据处理单元(data process unit,简称DPU),而DPU和导航传感器统称为局部终端处理单元(local terminal unit,简称LTU).其简化的系统体系结构如图 5所示.
 | Fig. 5 Simplified architecture of the GNC system 图 5 GNC系统的简化体系结构 |
我们以AOCS子系统为例.AOCS子系统由一个系统构件来表示,包括进程构件S_AOCS_Process、处理器构件AOCS_Proc、存储器构件AOCS_Mem、总线构件AOCS_LAN以及3个外设构件,它们之间采用总线构件来通信.同时,GNC系统涉及星箭分离、速率阻尼、对日捕获、对月捕获、三轴稳定、变轨机动等模式,我们以稳定(stabilization)和机动(maneuver)两个模式为例,如图 6所示.
 | Fig. 6 AADL graphic model of the AOCS subsystem 图 6 AOCS子系统的AADL图形化模型 |
AOCS子系统涉及4种任务的执行:控制任务、遥测遥控任务、系统监测任务以及空闲任务,我们主要考虑控制任务.控制任务用来完成对航天器姿态与轨道的控制,包括发送信息采集指令(Star_Sensor_Data_Sampling, Gyroscope_Data_Sampling,Camera_Data_Sampling,Accelerometer_Data_Sampling)、姿态确定(attitude filter)、轨道确定(orbit filter)、姿态制导1(attitude guidance 1)、姿态控制1(attitude control 1)、姿态制导2(attitude guidance 2)、姿态控制2(attitude control 2)、任务制导律(guidance law)等子任务.整个控制任务的周期设为360ms,因此,这些子任务的周期也设为360ms,但执行时间不同.在稳定模式下,Star_Sensor_Data_Sampling, Gyroscope_Data_Sampling,Attitude Filter,Camera_Data_Sampling,Orbit Filter,Attitude Guidance 1,Attitude Control 1等子任务按顺序执行;在机动模式下,Gyroscope_Data_Sampling,Attitude Filter,Accelerometer_Data_ Sampling,Orbit Filter,Guidance Law,Attitude Guidance 2,Attitude Control 2等子任务按顺序执行.所有子任务均采用周期性线程来描述,任务之间采用的数据端口通信机制为即时通信.表 1给出了AOCS子系统任务的周期、执行时间、资源消耗(功耗、存储)以及所属的模式.
| Table 1 Parameters of the tasks of the AOCS subsystem表 1 AOCS子系统任务的参数 |
基于AADL2TASM模型转换工具,实现AADL模型到TASM模型的自动转换.
首先,直接基于TASM ToolSet对转换得到的TASM模型进行分析.TASM ToolSet支持对模型的完整性和一致性进行验证,以及对时间行为和资源行为进行仿真分析.图 7给出了TASM模型中所有抽象机的执行时序.
 | Fig. 7 Time simulation of the TASMToolSet图 7 基于TASMToolSet的时间仿真分析 |
同时,TASM ToolSet为每种资源给出一个总体资源消耗分析图,由于资源消耗一般定义为一个区间,因此, TASM ToolSet按照区间的最小值、最大值、平均值以及随机值这4种情况对系统的资源消耗情况进行分析,如图 8所示.
 | Fig. 8 Resource simulation of the TASMToolSet图 8 基于TASMToolSet的资源仿真分析 |
其次,基于UPPAAL对死锁、安全性、活性以及实时性质进行验证,UPPAAL和TASMToolSet可以互补,共同为TASM模型提供丰富的验证与分析能力.我们使用TASM2UPPAAL模型转换工具,自动生成对应的时间自动机表示,如图 9和图 10所示.
 | Fig. 9 Timed automaton expression of mode change 图 9 模式变换的时间自动机表示 |
 | Fig. 10 Timed automaton expression of the task of Star_Sensor_Data_Sampling图 10 Star_Sensor_Data_Sampling任务的时间自动机表示 |
TASM支持的数据类型有Integer,Boolean,Float以及用户自定义类型,而UPPAAL只支持Integer类型,对于用户自定义类型,如线程的状态,设有n个成员,在UPPAAL中用数组int[0,n-1]来表示,“0”对应第1个成员“n-1”对应第n个成员,对于Boolean类型,用int[0,1]来表示,这里,“0”代表true,“1”代表false;TASM和UPPAAL对时间的表达也不同,TASM的时间定义在变迁上,而UPPAAL的时间定义在状态上,因此,对于TASM规则上的时间,在UPPAAL上通过增加一个中间状态来表示,如图中的waiting_hyper_period_S,begin_mode_change_S2M等状态;TASM规则和UPPAAL时间自动机的变迁是对应的,而对于“t:=next”等待机制,通过增加一个额外的时间自动机来表示.
在此基础上,可以对死锁、安全性、活性等性质进行验证,例如:
(1) 系统不存在死锁,A[×]!deadlock;
(2) 安全性,如“当系统处于稳定模式,Star_Sensor_Data_Sampling任务一定会被激活”:
A[×](CurrentMode==0) imply (Activation_SSDS==0);
(3) 活性,如“系统终究会进入稳定模式”,Eá×ñ (CurrentMode==0).
此外,还可以基于观察自动机(observer)对最坏响应时间、端到端延迟、可调度性等实时性质进行验证.
本文没有将AADL子集直接转换到UPPAAL:首先,UPPAAL支持的数据类型较少;其次,UPPAAL不能支持资源属性的表达;最后,TASM作为中间模型,同时支持UPPAAL和仿真分析工具TASMToolset,在一定程度上可以实现形式验证与仿真分析的互补.
7 相关工作转换语义方法是研究AADL语义的一种重要手段,如转换到BIP,Fiacre,TLA+,Signal,IF,RTMaude,ACSR, Lustre,Petri Net等目标语言.
法国Verimag实验室提出了AADL到BIP的语义转换[4],主要涉及进程、线程、子程序、处理器等构件的执行语义,而线程通信和行为附件的语义定义不够详细;为了方便理解,该研究都以图示的方式给出语义,关注的研究子集和转换规则主要采用自然语言描述.
空中客车公司的TOPCASED项目提出了AADL到中间语言Fiacre的语义转换[5],主要给出了线程执行和通信的转换原理,所关注的研究子集和转换规则采用自然语言进行描述.
法国IRIT实验室采用动作时序逻辑描述语言TLA+对AADL执行模型的部分语义做了初步研究[6],包括端口通信、共享变量的构件间通信、抢占式调度策略以及模式的语义,这是AADL语义形式化的最早研究工作,其转换规则主要以语义函数的方式给出,但TLA+的模型检测工具TLC的验证能力较弱.
法国INRIA-Rennes实验室基于同步语言Signal对AADL语义进行了研究[7],主要是针对线程执行、通信、行为附件等概念;在转换方面,给出了系统构件和线程构件的形式定义,并以语义函数的方式给出了部分转换规则的抽象表示.
Abdoul等人将AADL转换到IF语言[10],支持线程执行、通信、行为附件到IF的转换,但不是AADL标准的行为附件,而是用IF语言专门为AADL定义的行为附件;在转换方面,一个AADL线程对应两个IF进程构件,分别用于描述分发和线程行为,时间用IF时钟来表示;关注的研究子集和转换规则采用自然语言描述.
Olveczky等人提出了AADL到实时Maude的语义转换[11],实时Maude是一种基于重写逻辑(rewriting logic)的实时系统建模语言,在转换方面,研究子集和转换规则主要采用自然语言进行描述.
Pennsylvania大学提出了AADL到资源进程代数ACSR的语义转换[12],主要包括线程执行、通信以及资源共享的语义描述,目的是为了进行可调度性分析,其转换规则采用伪代码算法的形式给出.
欧盟ASSERT项目将AADL转换到同步语言Lustre[13],主要涉及线程执行、调度以及资源共享的执行语义;在转换方面,研究子集和转换规则主要采用自然语言进行描述,而且语义是以例子的形式给出.
法国LAAS实验室基于广义随机Petri网专门研究AADL故障模型附件的语义[14],目的是为了支持可靠性、可用性、可维护性等非功能性质的分析.
在国内同行的工作方面,文献[30]提出了一种AADL模型可靠性分析评估工具,主要涉及AADL故障模型附件;文献[31]将AADL模型转换到混成自动机模型,主要关注AADL模型的可调度分析.
本文提出的AADL2TASM形式转换语义与这些已有研究的不同之处主要表现在以下几个方面:
(1) AADL子集:依据航天器等安全攸关实时系统的部分特征,本文选取了一个较为完整的AADL子集,并清晰地分析了体系结构、执行模型以及行为附件之间的关系.
(2) 目标语言的表达能力:TASM支持功能、时间以及资源等行为的描述,而已有研究的目标语言很少关注资源行为的表达.
(3) 转换语义的定义:按照“层次化、模块化”的方式,形式定义AADL子集的转换语义,并清晰地刻画各模块之间的关系,每个模块都包括两部分:语法结构映射为TASM环境变量,动态行为映射为TASM抽象机,并基于类ML的元语言来描述映射和组合关系.
8 总结与讨论AADL语言的形式语义及其支持的形式验证与分析方法是目前学术界和工业界共同关注的热点问题.本文提出了一种基于时间抽象状态机的AADL形式转换语义.与已有的AADL转换语义研究相比,该语义定义具有较为完整的AADL研究子集、较强的目标语言表达能力以及对对象语言、目标语言和转换语义规则精确描述等优点.在转换语义的基础上,基于AADL开源建模环境OSATE,设计并实现了AADL模型验证与分析工具AADL2TASM,并基于航天器导航、制导与控制系统进行了实例性验证.
基于各种转换语义的定义,已有研究分别实现了AADL模型到不同目标模型的转换,其目的是为了重用目标模型上已有的验证和分析能力.但是如何验证模型转换的正确性是一个重要问题,我们称此为语义保持(semantics preservation)问题.在这些AADL模型转换研究中,大都采用手工确认的方式,或者假设语义是保持的,很少进行语义保持的证明.在文献[32, 33]中,我们提出了一种基于双版本形式语义的AADL模型转换的语义保持证明方法:(1)由于我们无法直接证明形式转换语义和AADL标准给出的非形式语义之间的等价性,因此与形式转换语义对应,基于时间变迁系统(timed transition system,简称TTS)给出相应AADL子集的语义,作为语义保持证明的参考语义(reference semantic);(2) 将转换语义定义中的TASM表示和TASM语言本身的操作语义进行组合,构成另一个TTS;(3) 证明两个TTS满足模拟等价关系(simulation equivalence),即,AADL子集的语义在AADL到TASM的模型转换中得到保持,并基于定理证明器Coq[34]对相关定理进行了证明.当然,这里存在“用TTS表达的AADL语义和AADL标准语义是否一致”的问题.但是双版本形式语义的给出,并证明两者的等价性,在一定程度上能够降低模型转换出错的概率,并提高对AADL语义进行形式解释的可信度.
致谢 感谢法国图卢兹计算机与信息研究所(Institut de Recherche en Informatique de Toulouse)的Mamoun Filali教授对本文工作的理论指导和支持,感谢北京控制工程研究所顾斌总工程师的讨论和帮助,同时对参与模型转换工具系统开发的孙科、蒋树、张腾等同学表示感谢.| [1] | Lewis B. Architecture based model driven software and system development for real-time embedded systems. In: Radical Innovations of Software and Systems Engineering in the Future. LNCS 2941, 2004. 249-260 . |
| [2] | SAE. Architecture analysis & design language (standard SAE AS5506). 2004. http://www.sae.org |
| [3] | SAE. Architecture analysis & design language (standard SAE AS5506A). 2009. http://www.sae.org |
| [4] | Chkouri MY, Robert A, Bozga M, Sifakis J. Translating AADL into BIP—Application to the verification of real-time systems. In: Models in Software Engineering. LNCS 5421, 2009. 5-19 . |
| [5] | Berthomieu B, Bodeveix JP, Chaudet C, Zilio SD, Filali M, Vernadat F. Formal verification of AADL specifications in the topcased environment. In: Proc. of the 14th Ada-Europe Int’l Conf. on Reliable Software Technologies. Berlin, Heidelberg: Springer-Verlag, 2009. 207-221 . |
| [6] | Rolland JF, Bodeveix JP, Filali M, Chemouil D, Dave T. Modes in asynchronous systems. In: Proc. of the 13th IEEE Int’l Conf. on Engineering of Complex Computer Systems. IEEE, 2008. 282-287 . |
| [7] | Ma Y, Talpin JP, Gautier T. Virtual prototyping AADL architectures in a polychronous model of computation. In: Proc. of the 6th ACM/IEEE Int’l Conf. on Formal Methods and Models for Co-Design. IEEE/ACM, 2008. 139-148 . |
| [8] | Combemale B, Cregut X, Garoche PL, Thirioux X. Essay on semantics definition in MDE—An instrumented approach for model verification. Journal of Software, 2009,4(9):943-958 . |
| [9] | Cleenewerck T, Kurtev I. Separation of concerns in translational semantics for DSLs in model engineering. In: Proc. of the 2007 ACM Symp.on Applied Computing. ACM Press, 2007. 985-992 . |
| [10] | Thomas A, Joël C, Philippe D, Pierre YP, Jean CR. AADL execution semantics transformation for formal verification. In: Proc. of the 13th IEEE Int’l Conf. on Engineering of Complex Computer Systems. Washington: IEEE Computer Society, 2008. 263-268 . |
| [11] | Ölveczky PC, Boronat A, Meseguer J. Formal semantics and analysis of behavioral AADL models in real-time Maude. In: Formal Techniques for Distributed Systems. LNCS 6117, 2010. 47-62 . |
| [12] | Sokolsky O, Lee I, Clark D. Schedulability analysis of AADL models. In: Proc. of the 20th Int’l Parallel and Distributed Processing Symp. IEEE, 2006 . |
| [13] | Jahier E, Halbwachs N, Raymond P, Nicollin X, Lesens D. Virtual execution of AADL models via a translation into synchronous programs. In: Proc. of the 7th ACM & IEEE Int’l Conf. on Embedded Software. ACM Press, 2007. 134-143 . |
| [14] | Ana ER. Dependability modeling and evaluation—From AADL to stochastic Petri nets [Ph.D. Thesis]. Toulouse: LAAS, 2008. |
| [15] | Börger E. The origins and the development of the ASM method for high level system design and analysis. Journal of Computer Science, 2001,8(1):2-74 . |
| [16] | Ouimet M, Lundqvist K. The TASM Language Reference Manual Version 1.1. Cambridge: The MIT Press, 2006. https://synrc.com/publications/cat/Temp/Logic/TASM-Ref.pdf |
| [17] | Ouimet M. A formal framework for specification-based embedded real-time system engineering [Ph.D. Thesis]. Cambridge: The MIT Press, 2008. |
| [18] | Milner R, Tofte M, Harper R, MacQueen D. The Definition of Standard ML (Revised). Cambridge: The MIT Press, 1997. |
| [19] | The SEI AADL Team. An extensible open source AADL tool environment (OSATE). Software Engineering Institute, CMU, 2006. http://www.aadl.info/aadl/currentsite/tool/osate.html |
| [20] | Behrmann G, David A, Larsen KG. A tutorial on UPPAAL. In: Formal Methods for the Design of Real-Time Systems. LNCS 3185, 2004. 200-236 . |
| [21] | Ouimet M, Lundqvist K. The TASM ToolSet: Specification, simulation, and formal verification of real-time systems. In: Computer Aided Verification. LNCS 4590, 2007. 126-130 . |
| [22] | SAE-AS5506/2, SAE Architecture Analysis and Design Language (AADL) Annex Volume 2, Annex D: Behavior Annex. Int’l Society of Automotive Engineers, 2011. |
| [23] | SAE-AS5506/1, SAE Architecture Analysis and Design Language (AADL) Annex Volume 1, Annex E: Error Model Annex. Int’l Society of Automotive Engineers, 2006. |
| [24] | SAE-AS5506/2, SAE Architecture Analysis and Design Language (AADL) Annex Volume 2, Annex F: ARINC653 Annex. Int’l Society of Automotive Engineers, 2011. |
| [25] | Yang ZB, Pi L, Hu K, Gu ZH, Ma DF. AADL: An architecture design and analysis language for complex embedded real-time systems. Ruan Jian Xue Bao/Journal of Software, 2010,21(5):899-915 (in Chinese with English abstract). http://www.jos.org.cn/ 1000-9825/3700.htm |
| [26] | Hugues J, Gheoghe S. The AADL constraint annex. In: Proc. of the SAE 2013 AeroTech Congress & Exhibition. Montreal, 2013. http://oatao.univ-toulouse.fr/9291/ |
| [27] | Larson BR, Chalin P, Hatcliff J. BLESS: Formal specification and verification of behaviors for embedded systems with software. In: NASA Formal Methods. LNCS 7871, 2013. 276-290 . |
| [28] | Jouault F, Kurtev I. Transforming models with ATL. In: Proc. of the 2005 Int’l Conf. on Satellite Events at the MoDELS. Berlin, Heidelberg: Springer-Verlag, 2006. 128-138 . |
| [29] | Li ZS, Gu B. Application research of AADL in design of spacecraft control system. Aerospace Control and Application, 2011,37(1): 55-58 (in Chinese with English abstract) . |
| [30] | Dong YW, Wang GR, Zhang F, Gao L. Reliability analysis and assessment tool for AADL model. Ruan Jian Xue Bao/Journal of Software, 2011,22(6):1252-1266 (in Chinese with English abstract). http://www.jos.org.cn/1000-9825/4014.htm |
| [31] | Gui SL, Luo L, Liu Q, Guo FL, Lu SP. UCaS: A schedulability analysis tool for AADL models. In: Proc. of the Int’l Conf. on Embedded and Ubiquitous Computing. IEEE, 2008. 449-454 . |
| [32] | Yang ZB, Hu K, Ma DF, Bodeveix JP, Pi L, Talpin JP. From AADL to timed abstract state machines: A verified model transformation. The Journal of Systems and Software, 2014,93:42-68 . |
| [33] | Yang ZB, Hu K, Bodeveix JP, Pi L, Ma DF, Talpin JP. Two formal semantics of a subset of the AADL. In: Proc. of the 16th IEEE Int’l Conf. on Engineering of Complex Computer Systems. IEEE, 2011. 344-349 . |
| [34] | Bertot Y, Castéran P. Interactive theorem proving and program development (CoqArt: The calculus of inductive constructions). In: Proc. of the Texts in Theoretical Computer Science. Berlin, Herdelberg: Springer-Verlag, 2004. |
| [25] | 杨志斌,皮磊,胡凯,顾宗华,马殿富.复杂嵌入式实时系统体系结构设计与分析语言:AADL.软件学报,2010,21(5):899-915. http:// www.jos.org.cn/1000-9825/3700.htm |
| [29] | 李振松,顾斌.AADL在航天器控制系统设计中的应用研究.空间控制技术与应用,2011,37(1):55-58 . |
| [30] | 董云卫,王广仁,张凡,高磊.AADL模型可靠性分析评估工具.软件学报,2011,22(6):1252-1266. http://www.jos.org.cn/1000-9825/ 4014.htm |